
上个月末,我们的实验室迎来了一个非常重要的“人”:Robi机器人(他有一个摄像头和一个扬声器!)。我们有幸组装了它,然后让它跳起了舞。与此同时,我们对未知领域的探索也开始了,在通过软件发送命令控制机器人时,我不禁想知道它到底有多安全。
一开始我预测是某种蓝牙的连接,但后来发现机器人有自己的Wifi网络板,所以拥有加入现有网络的能力,默认情况下还自带一个有暗示性SSID的开放式接入点。开始时我也遇到了一个防御机制,具体被定义为仅允许与另一台机器建立单独的C&C连接。
经过进一步检查C&C移动软件,我看到了确认为网关/WiFi管理界面的IP地址,在快速扫描之后,确定开放的端口如下:
23:用于即将到来的C&C通信。
24:用于摄像头实时视频流。
80:用于web管理界面。
8080:用于CLI(命令行界面)。
所以,主要的范围就是访问底层结构(或OS级别)以查看其内部核心。幸运的是,我还没有完成这个目标:)
接入点分析
我首先分析了嵌入在机器人主板中的Wifi接入点。它配有一个开放的网络,默认情况下不受WPA/WPA2 PSK的保护。同时,在连接到Web管理界面即80端口时没有认证机制的防护。
这些特点极大地改善了用户体验,但同时减少了对机器人的防护。在更深层次的检查中,我发现它没有关于Web管理界面认证机制的任何可配置的设置。
研究过程中已经确认的漏洞列表:
1.Web管理界面的XSS持久性漏洞
2.无需身份验证访问CLI(或通过控制台移动机器人)
3.功能性逻辑绕过
4.反射型XSS(在IE兼容模式下有用)
5.开放重定向
6.用于Dos情况的跨站请求伪造
Web界面中的发现
我继续对这网络应用深入分析,然后遇到的第一个参数就是System name。正如所料,这个名字完全可以个性化,那么为什么不从XSS载荷开始做点事呢?

事实上,System name的值似乎没有被过滤,它被进一步存储在浏览器中。在我看来,这个特殊漏洞会威胁到用户/所有者的安全,因为它给予了攻击者机会来挂载钓鱼网络,以实施钓鱼攻击。
此外,只有通过访问网页,受害者才能部分/完全意识到攻击,因为SSID也是有漏洞的,但是这里需要了解一下:不同于System name,注入的有效载荷也会出现在扫描中的接入点列表中,这会触发警报。
使用Web界面,我也注意到参数变量“反射”在网页中,但是运气不好,因为Content-Type返回text/plain。但是,它确实意味着其对IE用户的兼容模式有一定威胁。

在某些时候,网页通过名为01的GET参数的值将用户重定向到一个网站的页面。我们可以滥用此参数并将用户重定向到任意选择的地址。所以这可以用于将目标重定向到钓鱼网站。

与CLI(命令行界面)进行交互
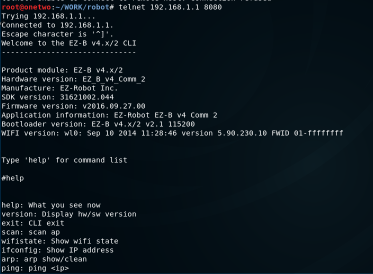
机器人的一个非常有趣的端口就是8080,当连接时,就会显示一个非常棒的命令行界面,其具有很长的功能列表。不过也有不好的地方,其中之一就是服务不提供任何形式的认证/授权。在这些功能中,我们可以注意memshow,memdump,memset和flash memory map这样的行为(这对于尝试访问OS层非常有用,但是我们还在继续研究,也请多多关注)。
定义为servo(伺服)的功能允许我们以给定的速度移动72个伺服电机中的一个,这个操作实际上绕过了整个系统的功能逻辑。这是为什么呢?因为用户需要在下载桌面/扩展移动应用程序之前创建帐户并登录才能与机器人交互。
另外,为了使用servo(伺服)命令,必须给出2个输入参数。第一个是伺服电机端口。组装机器人并连接转子时,主母板上显示3个总线电路,每个总线电路包含不同数量的端口。这些端口被命名为Dxy,其中第一个数是从0到23的数字。另一个是任意选择的转子的旋转功率或旋转角度。
访问摄像头
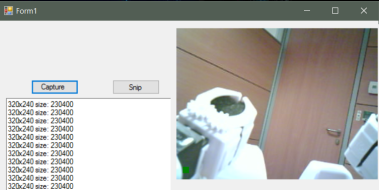
在与机器人电机成功互动之后,我把注意力转移到放置在机器人头上的嵌入式摄像头。我没能成功尝试并解释来自端口24的流式输入,不过还好看到了开发人员提供的SDK,因为SDK中包含了解释视频流的示例。现在想象一个可能发生的攻击情景:未经授权的攻击者能够捕获摄像头流媒体,并通过公共SDK,CLI或自行开发的程序成功地利用机器人。
在我看来,有几个攻击向量可以让攻击者与机器人进行交互:
机器人正在运行,默认情况下实现嵌入式开放式WiFi
机器人连接到攻击者可以访问的公共网络
假设WiFi设有密码,攻击者就要设法破解机器人的嵌入式WiFi密码。
所以,如果有人(比如隔壁老王)有一个容易出现上述攻击的机器人,就可能会导致不必要的隐私泄露。我们都可以想象到这会出什么问题。
拒绝“机器人”攻击
现在回到分析系统的Web部分,我想更多地了解机器人网络功能的信息。显然,从桌面的和移动的界面,用户都可以扫描接入点,并与机器人接入同一网络中(用户可以选择接入机器人的接入点,也可以将机器人接入现有网络)。
当用户错误地设置登录配置时,问题就出现了。所以从Web管理应用中,如果用户输入了一个不合适的SSID或密码,机器人就会登陆失败,然后发出错误提示。现在问题是用户不能连回机器人来修正错误,因为:
用户连接到机器人开放的WiFi,所以他可以访问机器人的Web应用来设置网络登录信息。
如果配置了网络登录,机器人将取消使用开放的WiFi,并尝试使用另一个指定的网络。
之后在每次启动时,他都会尝试加入网络,如果加入失败就会进入待机模式。
因此,如果用户现在卡在机器人无法加入网络的情况,那么只能硬重置了。这个缺陷也可以被具有网络访问机器人的攻击者所滥用,他可以利用跨站请求伪造攻击,以破坏机器人的可用性,导致拒绝服务状况。
总结
鉴于机器人通信在WiFi上进行,合理的攻击情况如下所示:
从WiFi中取消身份验证客户端以中断C&C连接
如果机器人使用开放网络,那么可以访问Web应用程序并利用存储的XSS;
使用CLI控制机器人
使用摄像头监视机器人周围环境
发起拒绝服务攻击(强制拥有者重置机器人)
所有这些真的是一个有趣的经历,与机器人的整个互动很棒。在首次使用时,需要进行一些重新校准,但机器人和软件可以根据需要进行自定义。
就像其他新技术领域一样,它需要改进,特别是在像Robotics这样一个比较新的领域,并且在开发的早期阶段。我很高兴能够参与这个过程并提供帮助。我联系了提供商,他们同意就此发表研究博客。
*参考来源:securitycafe,Covfefe 编译